Two-phase Navier-Stokes with surface tension¶
Let’s consider the incompressible Navier-Stokes equations with two immiscible phases and surface tension to demonstrate more complex usage of Dune-MMesh’s capabilities.
A domain \(\Omega \subset \mathbb{R}^2\) is assumed to be separeted into two phases \(\Omega_i(t), i=1,2,\) by a sharp interface \(\Gamma(t)\).
Find \((u, p)\) and \(\Gamma(t)\) s.t. \begin{align} \renewcommand{\jump}[1]{[\mskip-5mu[ #1 ]\mskip-5mu]} \end{align} \begin{align} \rho u_t + \nabla \cdot (\rho u \otimes u) + \nabla \cdot T(u, p) &= 0, &\qquad &\text{in } \Omega_i(t), \quad &i&=1,2,\\ \nabla \cdot u &= 0, &\qquad &\text{in } \Omega_i(t), \quad &i&=1,2,\\ \jump{ p } &= \sigma \kappa \cdot n, &\qquad &\text{on } \Gamma(t),\\ \jump{u} &= 0, &\qquad &\text{on } \Gamma(t),\\ \dot x &= u, &\qquad &x \in \Gamma(t),\\ u(0) &= u_0, &\qquad &\text{in } \Omega_i(0), \quad &i&=1,2,\\ \Gamma(0) &= \Gamma_0. \end{align}
Here, \(T(u, p) := p I - \mu (\nabla u + (\nabla u)^T))\) is the stress tensor, \(\mu_i, i=1,2,\) are the dynamic viscositities and \(\rho_i, i=1,2,\) the densities of the two phases, \(\sigma\) is the surface tension and \(\kappa\) is the signed mean curvature of the interface times its normal.
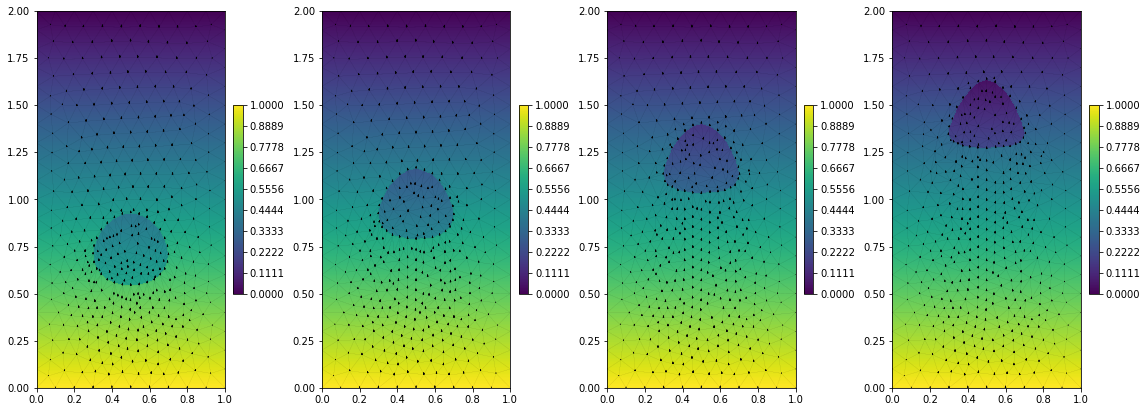
Now, we use Dune-MMesh to compute the dynamics of a droplet in a channel. Let us consider the circle grid.
[1]:
from dune.grid import reader
from dune.mmesh import mmesh, trace, skeleton, domainMarker
from dune.fem.view import adaptiveLeafGridView as adaptive
dim = 2
file = "grids/circle.msh"
gridView = adaptive( mmesh((reader.gmsh, file), dim) )
hgrid = gridView.hierarchicalGrid
igridView = adaptive( hgrid.interfaceGrid )
[2]:
from ufl import *
from dune.ufl import Constant
mu0 = Constant( 1, name="mu0")
mu1 = Constant( 1, name="mu1")
rho0 = Constant( 1, name="rho0")
rho1 = Constant( 2, name="rho1")
sigma = Constant(0.03, name="sigma")
dt = 0.05
T = 12.0
tau = Constant(dt, name="tau")
Domain markers¶
The domain markers are initialized by the physical identifiers passed from the mesh file. We use them to interpolate the phase’s parameters.
[3]:
from dune.mmesh import domainMarker
dm = domainMarker(gridView)
mu = (1-dm) * mu0 + dm * mu1
rho = (1-dm) * rho0 + dm * rho1
[4]:
from dune.fem.space import lagrange, dglagrange
pspace = dglagrange(gridView, order=1)
p = TrialFunction(pspace)
q = TestFunction(pspace)
uspace = dglagrange(gridView, dimRange=dim, order=2)
u = TrialFunction(uspace)
v = TestFunction(uspace)
ph = pspace.interpolate(0, name="ph")
uh = uspace.interpolate([0,0], name="uh")
uh1 = uspace.interpolate([0,0], name="uh1")
Curvature¶
The mean curvature \(\kappa\) of the interface times its normal can be computed by solving \begin{align*} \int_{\Gamma} \kappa \cdot \phi + \nabla x \cdot \nabla \phi \ dS = 0, &\qquad &\text{in } \Gamma(t).\\ \end{align*}
[5]:
from dune.fem.space import lagrange
from dune.fem.scheme import galerkin
kspace = lagrange(igridView, dimRange=dim, order=1)
k = TrialFunction(kspace)
kk = TestFunction(kspace)
curvature = kspace.interpolate([0]*dim, name="curvature")
ix = SpatialCoordinate(kspace)
C = inner(k, kk) * dx
C -= inner(grad(ix), grad(kk)) * dx
kscheme = galerkin([C == 0])
res = kscheme.solve(curvature)
Moving¶
We will move the interface movement by evaluating the trace of the bulk velocity \(u\).
[6]:
import numpy as np
x = SpatialCoordinate(pspace)
n = FacetNormal(pspace)
h = FacetArea(pspace)
def getShifts():
mapper = hgrid.interfaceGrid.indexSet
shifts = np.zeros((igridView.size(dim-1), dim))
for e in igridView.elements:
for v in e.subEntities(dim-1):
x = e.geometry.toLocal(v.geometry.center)
shifts[ mapper.index(v) ] = trace(uh)(e, x)
return shifts
Timeloop¶
Finally, we specify the time iteration where we adapt the mesh and solve the schemes.
[8]:
from dune.fem import parameter, adapt
parameter.append( { "fem.adaptation.method": "callback" } )
from dune.fem.plotting import plotPointData as plot
import matplotlib.pyplot as plt
N = 4
i = 0
fig, axs = plt.subplots(1, N, figsize=(16,6))
ph.interpolate(0)
uh.interpolate([0,0])
uh1.interpolate([0,0])
step = 0
t = 0
while t < T+dt:
hgrid.moveInterface( dt*getShifts() )
hgrid.markElements()
adapt([ph, uh, uh1, dm])
adapt([curvature])
A1.solve(uh1)
A2.solve(ph)
A3.solve(uh)
if int(N * t/T) > i:
plot(ph, figure=(fig, axs[i]), gridLines='black', linewidth=0.02)
plot(uh, figure=(fig, axs[i]), gridLines=None, vectors=[0,1])
i += 1
t += dt